Development of the Covariant Description for Contact Problems of Bodies with Arbitrarily Shaped Surface
- Ansprechperson:
PD Dr. habil. Alexander Konyukhov
Prof. Dr.-Ing. Karl Schweizerhof - Förderung:
Deutsche Forschungsgemeinschaft (DFG)
Project description
1. Contact kinematics
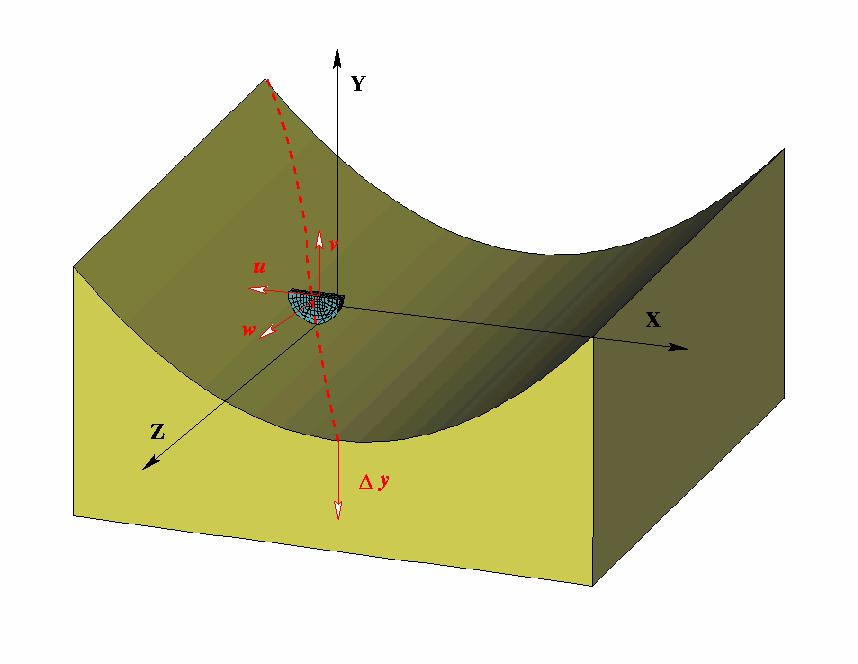
Contact problems are important in engineering practice when interaction of two and more bodies is considered. This leads to formulation of contact conditions on unknown contact surfaces, which makes the problem nonlinear. Variety of the methods is used to solve the problem numerically. The direct solution of the variational inequalities by nonlinear programming, the Lagrangian multiplier method, the penalty method and the augmented Lagrangian method are among them. The ''master-slave'' concept, based on the definition of penetration of a ''slave'' point S into the master contact surface was found as a robust technique to define contact. The penetration then is used to construct a contact functional, and therefore for the constitutive model for contact forces. The functional, defined over the unknown contact surface, is a nonlinear function of current geometry. Therefore, the whole problem requires iterative solution, e.g. by the Newton iterative scheme. It leads to linearization of the contact functional. This procedure is often described in global reference coordinate system. The core of the covariant description is to describe the contact conditions in the specially defined spatial local coordinate system which corresponds to the well-known closest point procedure, see Fig.1. Namely, the surface coordinate system  ,
,  gives rise a spatial coordinate system, defined at the contact point C.
gives rise a spatial coordinate system, defined at the contact point C.
Thus, any spatial vector in space can be defined as

where the third coordinate is value of penetration. The base vectors of the system are given as



where  are components of the metric tensor,
are components of the metric tensor,  are components of the surface curvature tensor. Since contact is an interaction between surfaces then each necessary equation especially for the linearization will be considered on the tangent plane, i.e. at
are components of the surface curvature tensor. Since contact is an interaction between surfaces then each necessary equation especially for the linearization will be considered on the tangent plane, i.e. at  The differential operations are considered in the covariant form. This allows to obtain the description which is applicable to any approximation of the contact surface, i.e. in the covariant form. Formulation of the evolution equations in the covariant form allows to generalize the contact conditions in order to include various contact interface laws. The numerical examples show the robustness of the current description.
The differential operations are considered in the covariant form. This allows to obtain the description which is applicable to any approximation of the contact surface, i.e. in the covariant form. Formulation of the evolution equations in the covariant form allows to generalize the contact conditions in order to include various contact interface laws. The numerical examples show the robustness of the current description.
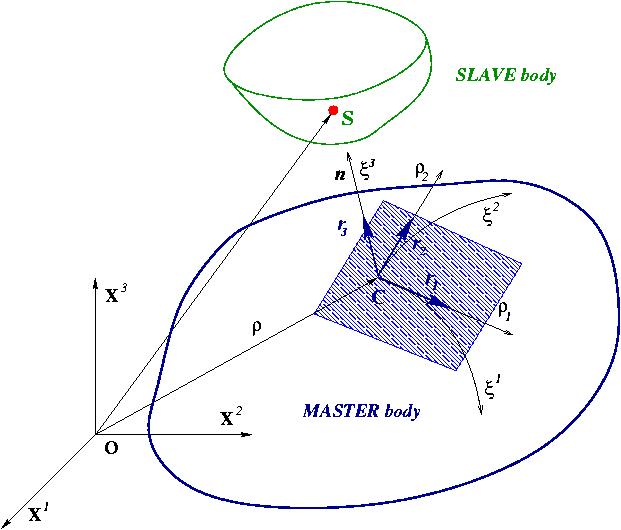
Figure 1: Introduction of the local surface coordinate system.
2. Frictionless contact
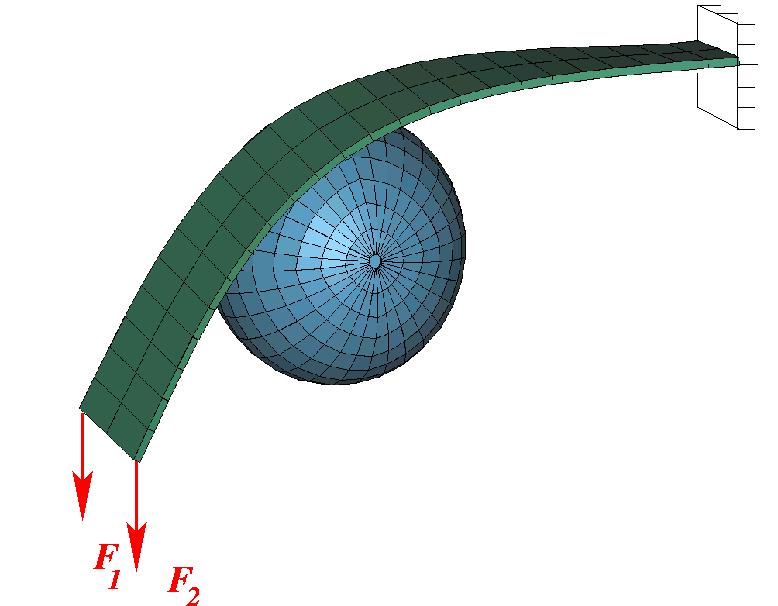
2.1 Bending a plate over a sphere. Large deflection contact.
2.2 Large sliding between cylinders.
3. Frictional contact
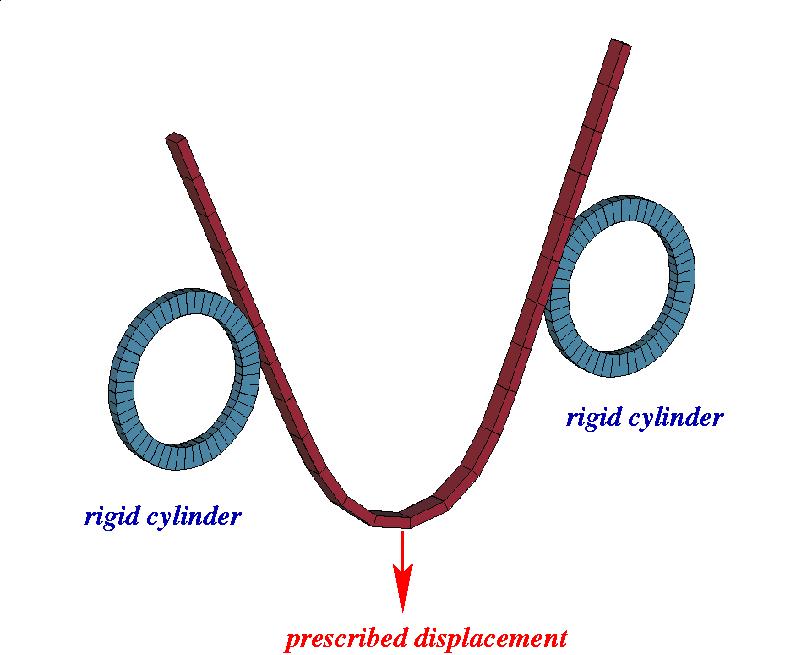
3.1 Spiral motion of a semi-cylinder on a rigid parabolic cylinder.
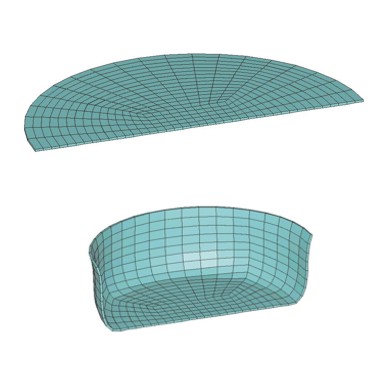
3.2 Deep drawing problem.